A class for multithreading with a signaling system. More...
#include <thread.h>
Public Member Functions | |
| Thread (const char *name) | |
| Default constructor. More... | |
| ~Thread () | |
| Destructor:not virtual. More... | |
| virtual void | run ()=0 |
| Main execution loop is defined here. | |
| virtual void | preRun ()=0 |
| Called before entering the main execution loop, but after creating the thread. | |
| virtual void | postRun ()=0 |
| Called after the main execution loop exits, but before joining the thread. | |
| virtual void | preJoin () |
| Called before the thread is joined. | |
| virtual void | postJoin () |
| Called after the thread has been joined. | |
| virtual void | sendSignal (SignalContext signal_ctx) |
| Send a signal to the thread. | |
| virtual void | sendSignalAndWait (SignalContext signal_ctx) |
| Send a signal to the thread and wait for all signals to be executed. | |
| void | setAffinity (int i) |
| API method for setting the thread affinity. More... | |
| void | startCall () |
| API method: starts the thread. | |
| virtual void | stopCall () |
| API method: stops the thread. More... | |
| virtual void | requestStopCall () |
| API method: stops the thread. More... | |
| virtual void | waitStopCall () |
| API method: waits until the thread is joined. More... | |
| virtual void | waitReady () |
| Wait until thread has processed all its signals. | |
Protected Member Functions | |
| void | mainRun () |
| Does the preRun, run, postRun sequence. | |
| void | closeThread () |
| Sends exit signal to the thread, calls join. This method blocks until thread has exited. Set Thread::has_thread to false. | |
Static Protected Member Functions | |
| static void * | mainRun_ (void *p) |
Protected Attributes | |
| std::string | name |
| Name of the thread. | |
| bool | has_thread |
| true if thread has been started | |
| bool | stop_requested |
| bool | thread_joined |
| std::mutex | start_mutex |
| Mutex protecting start_condition. | |
| std::condition_variable | start_condition |
| Notified when the thread has been started. | |
| std::mutex | mutex |
| Mutex protecting the condition variable and signal queue. | |
| std::condition_variable | condition |
| Condition variable for the signal queue (triggered when all signals processed). Not necessarily used by all subclasses. | |
| std::mutex | loop_mutex |
| Protects thread's main execution loop (if necessary) | |
| std::deque< SignalContext > | signal_fifo |
| Signal queue (fifo). Redefine in child classes. | |
| bool | loop |
| Use this boolean to control if the main loop in Thread:run should exit. | |
| int | core_id |
| pthread_attr_t | thread_attr |
| Thread attributes, pthread_* way. | |
| cpu_set_t | cpuset |
| pthread_t | internal_thread |
Private Member Functions | |
| Thread (const Thread &) | |
| Void copy-constructor: this class is non-copyable. More... | |
| void | operator= (const Thread &) |
| Void copy-constructor: this class is non-copyable. | |
Detailed Description
A class for multithreading with a signaling system.
Thread class has a simple system for receiving signals. Signals are placed into a mutex protected fifo queue. The internal struct SignalContext defines data structures passed by the signals. Subclasses typically implement their own SingalContext
Constructor & Destructor Documentation
◆ Thread() [1/2]
| Thread::Thread | ( | const char * | name | ) |
Default constructor.
- Parameters
-
name - name of the thread core_id - bind to a specific processor. Default=-1, i.e. no processor affinity
◆ ~Thread()
| Thread::~Thread | ( | ) |
Destructor:not virtual.
Each subclass needs to invoke it's own Thread::stopCall() method
◆ Thread() [2/2]
|
private |
Void copy-constructor: this class is non-copyable.
We have a mutex member in this class. Those are non-copyable. Other possibility would be to manage a pointer to the mutex. The "pointerization" can be done at some other level as well (say, using pointers of this object)
Copying threads is not a good idea either
Member Function Documentation
◆ requestStopCall()
|
virtual |
API method: stops the thread.
Like Thread::stopCall() but does not block. Waiting for the thread to join is done in Thread::waitStoppedCall()
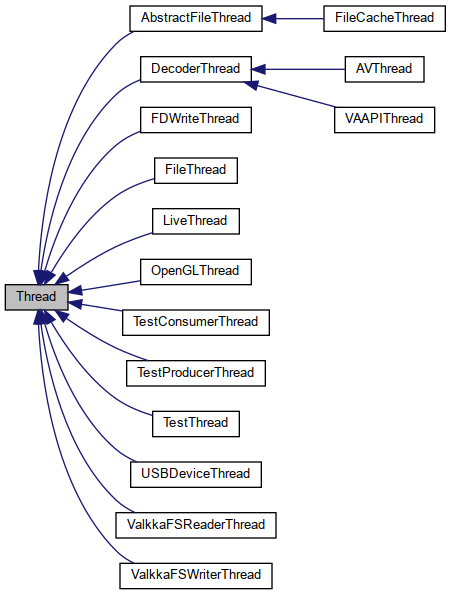
Reimplemented in ValkkaFSReaderThread, ValkkaFSWriterThread, USBDeviceThread, OpenGLThread, LiveThread, FDWriteThread, DecoderThread, FileCacheThread, and FileThread.
◆ setAffinity()
| void Thread::setAffinity | ( | int | i | ) |
API method for setting the thread affinity.
Use before starting the thread
◆ stopCall()
|
virtual |
API method: stops the thread.
If Thread::has_thread is true, sends exit signal to the thread and calls Thread::closeThread Waits until the thread is joined
Reimplemented in TestThread.

◆ waitStopCall()
|
virtual |
API method: waits until the thread is joined.
Use with Thread::requestStopCall

The documentation for this class was generated from the following files:
- /home/sampsa/C/valkka/include/thread.h
- /home/sampsa/C/valkka/src/thread.cpp